La marche du babouin sous la loupe de la biomécanique : entre efficacité et flexibilité du mouvement
Les analyses couplées de l'activité musculaire, de la cinématique et du mouvement du centre de masse lors de la marche quadrupède du babouin révèlent la présence d'un mécanisme de récupération énergétique, dit en "pendule-inverse", c'est-à-dire qu'un transfert d'énergie se produit lors du mouvement grâce à une oscillation optimale du centre de masse. Changer de substrat, de vitesse et d'organisation de mouvement des membres les uns par rapport aux autres affecte directement l'activité musculaire et le mécanisme de récupération énergétique chez le babouin. L'efficacité énergétique de la marche semble être restreinte à une vitesse relativement faible, sur sol et en séquence diagonale, c’est-à-dire que le mouvement d'un membre postérieur est suivi par celui du membre antérieur du côté opposé. Par opposition, dans une séquence latérale, le mouvement d'un membre postérieur est suivi par celui du membre antérieur du même côté. Cette étude, publiée dans Journal of Experimental Biology, implique des scientifiques du laboratoire Histoire Naturelle de l'Homme Préhistorique (HNHP – CNRS/MNHN/UPVD), de la station de primatologie (CNRS), et du laboratoire de morphologie fonctionnelle (FunMorph Lab) de l'Université d'Anvers en Belgique.
D’un point de vue anatomique, tous les mammifères sont quadrupèdes. Ils possèdent tous quatre membres que la plupart utilisent pour la locomotion, afin de se déplacer sur de nombreux substrats. Ce système originel a prouvé son efficacité puisqu'on remarque aisément que les tétrapodes ont envahi l’ensemble des niches écologiques disponibles sur Terre, depuis les parois rocheuses jusqu’à la canopée en passant par les plaines herbeuses et les déserts glacés et brûlants. Dans ce contexte, le système quadrupède des primates semble cependant avoir évolué vers des schémas cinématiques et fonctionnels inédits si on les compare aux autres mammifères quadrupèdes.
Un des éléments clés de l’évolution des primates est qu’ils ont envahi avec succès une niche écologique très complexe, le milieu arboricole. Cet environnement, par essence instable et discontinu, contraint en effet fortement les mouvements des animaux qui l’occupent. Dans un tel milieu, les contraintes fonctionnelles liées à l'équilibre et à la manœuvrabilité entrent directement en conflit avec les mécanismes d'économie d'énergie qui sont liés au mouvement. Dans ce contexte, il n'est donc pas possible de maximiser, au sein du même système locomoteur, économie d'énergie et stabilité. En effet, lors d'une marche au sol (substrat généralement stable et continu), il est possible d'utiliser des mécanismes qui permettent d'économiser de l'énergie, par exemple, un mouvement optimal du centre de masse dit en "pendule-inverse" : le centre de masse monte et descend au cours du cycle de marche, assurant ainsi un transfert optimal entre l'énergie cinétique et l'énergie potentielle. Ceci peut permettre à un individu d'économiser jusqu'à 70 à 80 % de son énergie lors de la marche. Lorsqu’un primate se déplace sur les branches, chaque pas est potentiellement perturbé par un substrat plus ou moins stable et diffère du précédent et la possibilité d'utiliser ce type de mécanisme semble compromis. Ainsi, pour être capable d'évoluer dans un tel milieu, les individus doivent maximiser leur stabilité et leur manœuvrabilité tout en assurant des dépenses énergétiques supportables. Cela peut passer par diverses adaptations du système musculo-squelettique et du contrôle moteur.
Parmi les nombreux modes posturo-locomoteurs, la quadrupédie reste la forme la plus commune de locomotion chez les primates, mais la manière avec laquelle ils marchent sur leurs quatre membres est particulière et susceptible de répondre aux contraintes fonctionnelles liées au contrôle de l'équilibre dans les arbres. Quatre éléments clés caractérisent la marche quadrupède des primates :
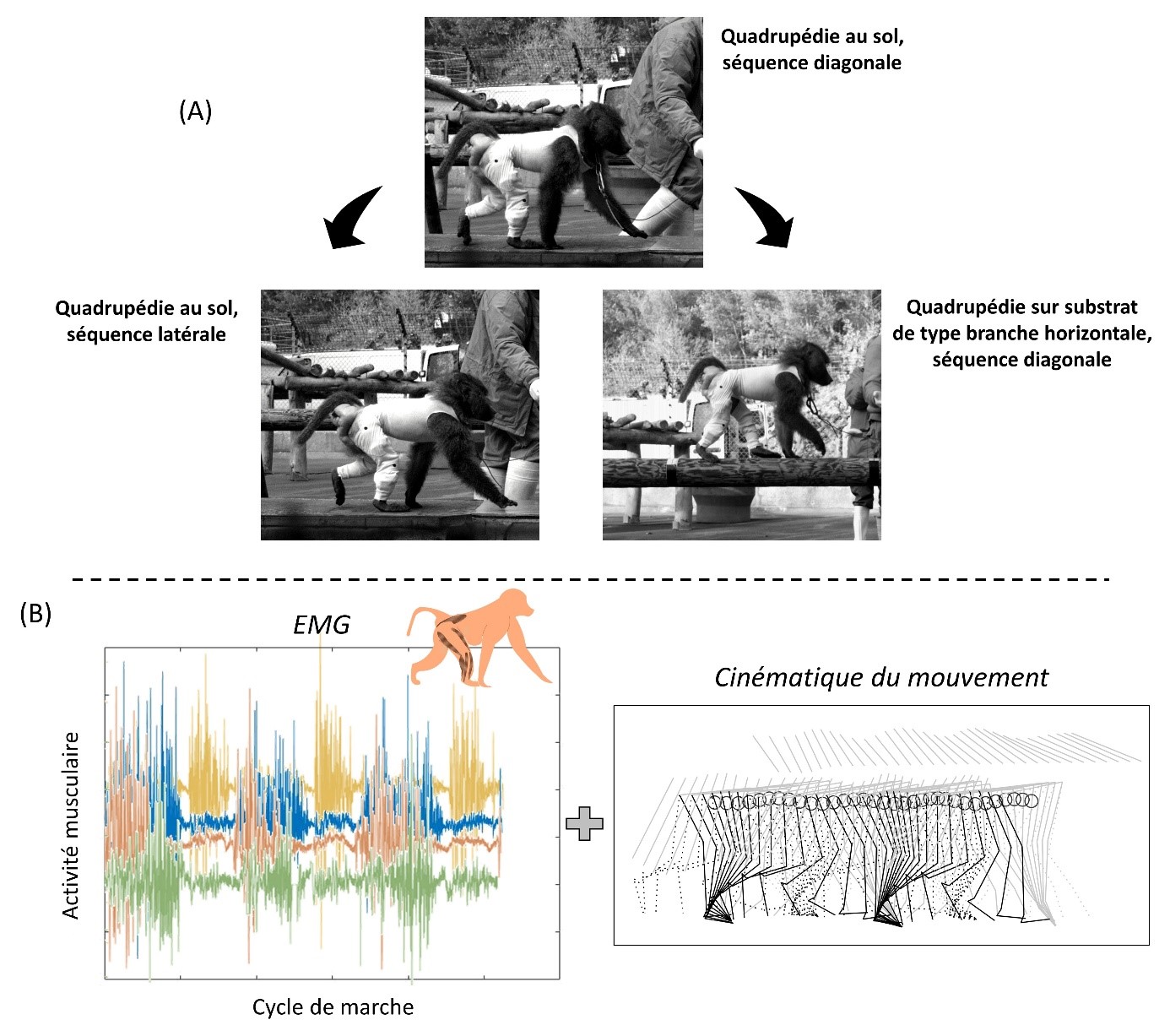
- les primates utilisent généralement une séquence de marche diagonale (le mouvement d'un membre postérieur est suivi par celui du membre antérieur du côté opposé), contrairement à la marche en séquence latérale de la plupart des autres mammifères quadrupèdes (le mouvement d'un membre postérieur est suivi par celui du membre antérieur du même côté) ;
- les membres postérieurs des primates supportent une plus grande proportion de leur masse ;
- l’angle de protraction des membres est très important au moment du contact de la main et du pied avec le substrat, et plus particulièrement au niveau du membre antérieur ;
- ils se déplacent en utilisant une marche généralement fléchie. Bien que les caractéristiques décrites ci-dessus peuvent sembler avantageuses pour la stabilité et la manœuvrabilité dans les arbres, de nombreuses études peinent à démontrer un lien clair entre ces éléments et les différentes contraintes générées par les substrats arboricoles.
Il n’existe donc pas aujourd'hui de réel consensus pour expliquer la présence de ces caractéristiques chez les primates, rendant ainsi les significations fonctionnelles et adaptatives particulièrement complexes. Il est toutefois clair que l'origine et la diversification des primates au sein du milieu arboricole a façonné la mécanique de leur marche ainsi que leur contrôle moteur.
Afin de mieux comprendre la signification fonctionnelle de ces caractéristiques, une étude intégrative de la marche quadrupède du babouin olive (Papio anubis) a été menée à la station de primatologie du CNRS, en collaboration avec des scientifiques du laboratoire Histoire Naturelle de l'Homme Préhistorique (HNHP – CNRS/MNHN/UPVD), et du laboratoire de morphologie fonctionnelle (FunMorph Lab) de l'Université d'Anvers en Belgique. Grâce à l'étude du mouvement, la mécanique du centre de masse a pu être décrite lors de séquences de marche quadrupède effectuées au sol ainsi que dans différents contextes de marche (séquence diagonale et séquence latérale) et de substrat. L'activité musculaire de six muscles des membres postérieurs a également pu être étudiée à l'aide d'électrodes de surface non-invasives.
Les résultats, publiés dans Journal of Experimental Biology, montrent que les babouins peuvent compter sur une récupération énergétique de type pendule-inverse (57 % en moyenne, valeur maximale observée de 84 %) lorsqu'ils marchent lentement (<0.9 m/s) en séquence diagonale avec un faible décalage de phase des membres (≈ 55 %) et au sol. L'organisation de l'activité musculaire est alors similaire à celle des autres mammifères quadrupèdes, reflétant ainsi les fonctions principales des muscles pour les mouvements des membres et le soutien du corps. En revanche, marcher sur une branche horizontale génère des ajustements à la fois au niveau du mouvement et au niveau musculaire, permettant ainsi d'assurer un meilleur contrôle et un meilleur maintien de l'équilibre. Enfin, marcher en séquence latérale augmente l'effort musculaire et semble réduire les taux de récupération énergétique par le mécanisme du "pendule-inverse". La présente étude soutient donc l'hypothèse que les primates sont en fait capables d'utiliser le mécanisme du "pendule-inverse" au sol lorsqu'ils se déplacent en quadrupédie en utilisant la séquence diagonale et à une vitesse relativement faible. Les primates peuvent donc être énergétiquement efficaces. Néanmoins, tout changement de séquence de marche et/ou de substrat semble influencer l'effort musculaire et l'économie d'énergie, suggérant ainsi que la grande flexibilité locomotrice des primates est présente au dépend de l'économie.
Référence
F. Druelle, A. Supiot, S. Meulemans, N. Schouteden, P. Molina-Vila, B. Rimbaud, P. Aerts, G. Berillon (2021) The quadrupedal walking gait of the olive baboon, Papio anubis: an exploratory study integrating kinematics and EMG. Journal of Experimental Biology